莱顿大学的研究人员利用3D打印技术制造出长度仅为几十微米的微型机器人,这些机器人无需任何传感器、软件或外部控制即可游泳、感知周围环境并绕过障碍物。该研究成果于2026年3月27日发表在《美国国家科学院院刊》(PNAS)上。
丹妮拉·克拉夫特教授和研究员魏梦诗设计的机器人是一种柔性链状结构,由多个相互连接的节段组成,每个节段的直径仅为5微米,连接杆的宽度仅为0.5微米。作为对比,一根头发的直径约为70至100微米。这些结构由Nanoscribe 3D微型打印机打印而成,研究团队指出,该打印机的打印能力已接近技术极限。
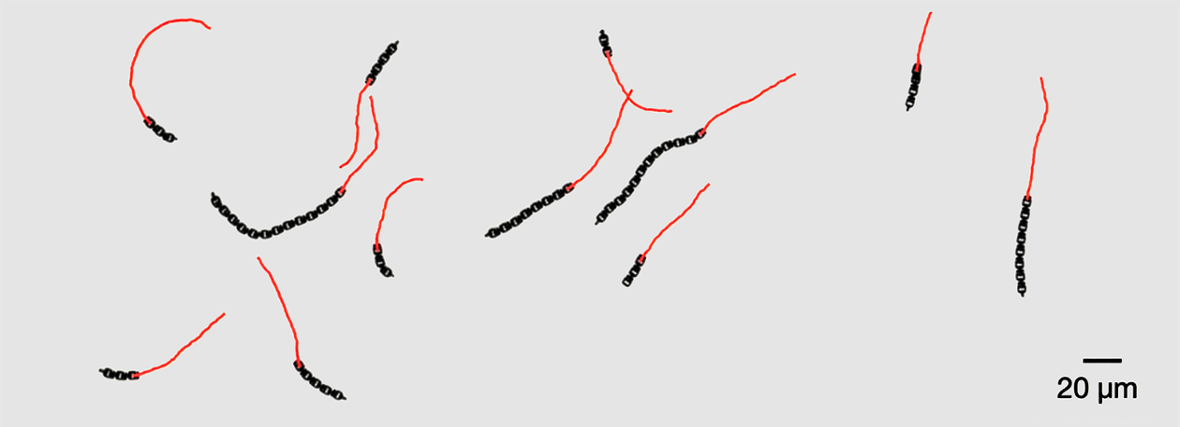
图片来源:莱顿大学
这些机器人的行为完全取决于它们的形状。当电场接通时,链条开始以大约每秒7微米的速度运动。克拉夫特表示,令团队感到惊讶的是形状和运动之间持续的反馈循环:“形状影响它的运动方式,而它的运动反过来又会改变它的形状。”这意味着无需任何微型电子元件就能赋予该装置她所谓的智能能力。
研究团队的测试揭示了机器人惊人的动物般行为。魏教授表示,当机器人减速或停止时,“它会开始摇尾巴,仿佛想要挣脱束缚”,因为后部组件会持续尝试向前推进。当遇到障碍物时,它会自动寻找其他路径。两台机器人相遇时,无需任何协调就能自行避开。它们还能将挡路的物体推开。

图片来源:莱顿大学
该设计的灵感来源于蠕虫和蛇,它们会不断改变自身形状以适应环境。克拉夫特解释说,在此之前,微型机器人“要么体积小而僵硬,要么体积大而灵活”。如何将体积小和灵活性完美结合在同一设备中,一直是目前所缺失的关键。
克拉夫特表示,下一步是了解这种动态行为究竟是如何产生的:“这些知识将帮助我们开发更先进的微型机器人和设备,同时也能更好地了解生物微型游泳者和生物体的物理特性。”该团队认为,这项技术在靶向药物输送、微创医疗程序和诊断方面具有潜在的应用价值。
来源:universiteitleiden.nl
相关文章